



Description
The FAME (Future Action Modelling Engine) Lab stands at the cutting edge of robotics research, operating as a virtual research laboratory under the auspices of the ERC project bearing the same name. This ambitious project is dedicated to exploring how robots can conceptualize and deliberate on future actions to preemptively address and avoid execution failures. A central focus of the FAME Lab’s research is enabling robots to learn manipulation tasks by observing instructional videos. This complex process involves the robot identifying essential motion patterns within these videos, understanding the rationale behind their effectiveness without explicit knowledge of the underlying physics, and adapting these critical motions to its own operational context, which introduces a variety of uncertainties. Overcoming these challenges would mark a significant milestone, granting robots the ability to autonomously learn from instructional content, thereby acquiring a wide range of skills and competencies. A practical application of this research could enable a robot to adeptly cut any fruit, using any tool, for any purpose, in any context, showcasing the potential for robots to achieve a remarkable level of autonomous functionality and versatility.
Approaching the Problem
Introduction
What is the problem we want to tackle?
-
Enabling robots to perform open-ended manipulation tasks
-
Developing a knowledge representation and reasoning (KR&R) framework
-
Learn task-specific motion patterns from demonstration
- E.g. YouTube, WikiHow
-
End Goal:
- Robots should in uncertain or novel environments be able to:
- Reason, Simulate and Contextualize actions on the first attempt
- Robots should in uncertain or novel environments be able to:
Why is it an interesting problem?
- Robots are currently unable to adapt to new complex tasks in real-world environments
- Robots would be capable of:
- Autonomous decision-making
- Learning from minimal data
- Executing task with human-like adaptability
Why is it a hard problem?
-
Generalization
- Inability to handle novel tasks and scenarios effectively
-
Simulation
- Lack of accurate, efficient mental simulations for prospective reasoning
-
Contextualization
- Failure to interpret underdetermined or ambiguous task descriptions
-
Integration
- Fragmented processing pipelines that prevent holistic reasoning and action
-
Efficiency
- Computational limitations and data inefficiency hinder real-world applications
Main Research Hypotheses
- Task Contextualization
- Infer missing details in underdetermined task requests
- Mental Simulation
- Use probabilistic mental simulation to anticipate the effects of robots’ actions
- Reducing task failures and improving adaptability to uncertain environments
- Hybrid KR&R
- Combination of symbolic + subsymbolic reasoning allows robots to generalize knowledge across different contexts
- Causal and Teleological Reasoning
- Acquire task-specific causal models through observation and simulation
- Enabling robots to reason about why certain actions achieve desired effects
- Adapt actions to new tasks without direct programming
- One-Shot Learning
- Via observing demonstrations robots can:
- Extract task-critical motion patterns
- Understand their causal effect
- Transfer these patterns to new objects, tools and environments
- Via observing demonstrations robots can:
- Inverse Contextualization (IC)
- IC infers the underlying task goals, constraints and physics-based motion parameters
- Allows to replicate and generalize the action
- E.g. flipping a pancake
- IC infers the underlying task goals, constraints and physics-based motion parameters
- Embodied Reasoning
- Improving physical skills by simulating how objects/materials behave under manipulation
- Similar to how humans develop motor skills
- Improving physical skills by simulating how objects/materials behave under manipulation
Example Videos
FAME Trailer: Show the Robot what to do!
-
Instance Segmentation and 6D Pose Estimation of some YCB objects
-
Event segmentation on data generated from videos
-
Mental Simulation During Robot Execution in the Multiverse
-
Object target tracking while avoiding dynamic obstacles
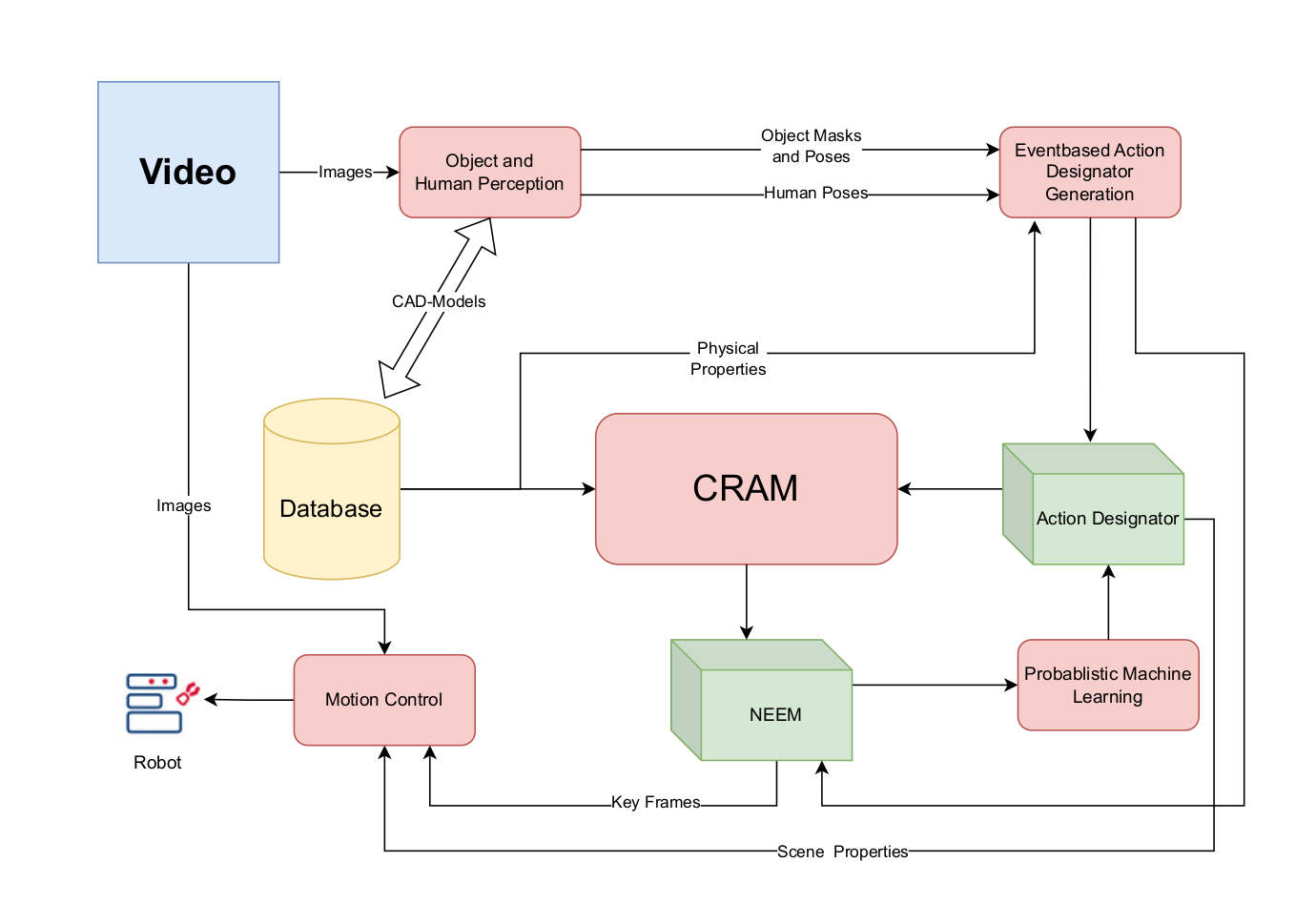
Software Components
- ROBOKUDO: A perception framework targeted for robot manipulation tasks.
- PyCRAM: The Python 3 re-implementation of CRAM, serving as a toolbox for designing, implementing, and deploying software on autonomous robots.
- Probalistic Model: This package contains fast and flexible implementations for various probabilistic models.
- Random Event: This package is designed to provide a simple and flexible way to generate events that are suitable for probabilistic reasoning in a python
- Episode Segmenter: A python library for segmenting simulation episodes of activities. This is done by detecting physical interactions, and events in the simulation.
Authors and Contact Details
- Max Gandyra
Email: gandyra@uni-bremen.de
Profile: Max Gandyra - Abdelrhman Bassiouny
Email: bassioun@uni-bremen.de
Profile: Abdelrhman Bassiouny - Alessandro Santonicola
Email: ale_san@uni-bremen.de
Profile: Alessandro Santonicola - Duc Than
Email: than@uni-bremen.de
Profile: Duc Than - Tom Schierenbeck
Email: tom_sch@uni-bremen.de
Profile: Tom Schierenbeck - Zhiyuan Gao
Email: gao@uni-bremen.de
Profile: Zhiyuan Gao - Prof. Michael Beetz, PhD
Head of Institute
Tel: +49 421 218 64001
Email: beetz@cs.uni-bremen.de
Profile: Michael Beetz