



Description
The MUHAI Kitchen Affordances Simulator was developed as part of a larger effort by the MUHAI project to benchmark natural language understanding software by parsing recipes into executable robot actions. As such, it features a very simplified robot – e.g. its hands float in the air and can travel quite far from its head, to simplify inverse kinematics.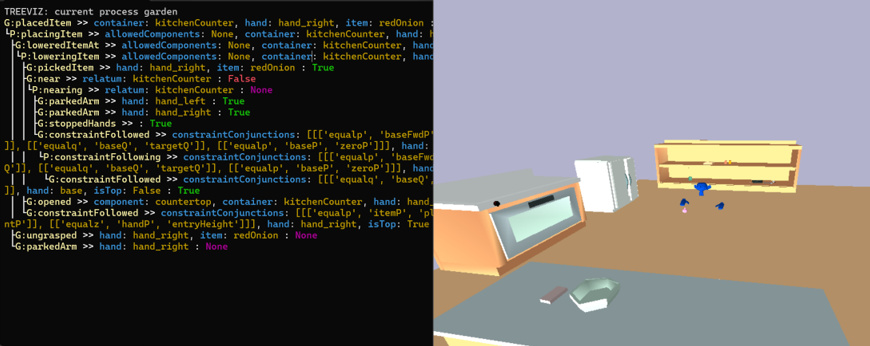
The MUHAI Kitchen Simulator. Left side shows a display of the current behavior tree of the robot. Right side shows an overview of a salad preparation scene.
On the other hand, the simulator implements various object behaviors that are needed for cooking tasks but go beyond rigid body simulation: fruits can be cut, peeled, or seeded, particles of various substances can be sprinkled upon various surfaces, mixtures of substances change to become new substances etc.
The knowledge modelling for the simulator makes use of the SOMA model of affordances, in particular by treating objects as having “dispositions” which inform what “custom dynamics” they can participate in. It is via these custom dynamics that phenomena beyond rigid body motion are implemented. For example, if an object has the cuttable disposition, it can be cut if an object with the canCut disposition moves in an appropriate way in its vicinity. Most of these affordances are similarly triggered by relative motions of other objects, rather than by the agent emitting a command to the environment.
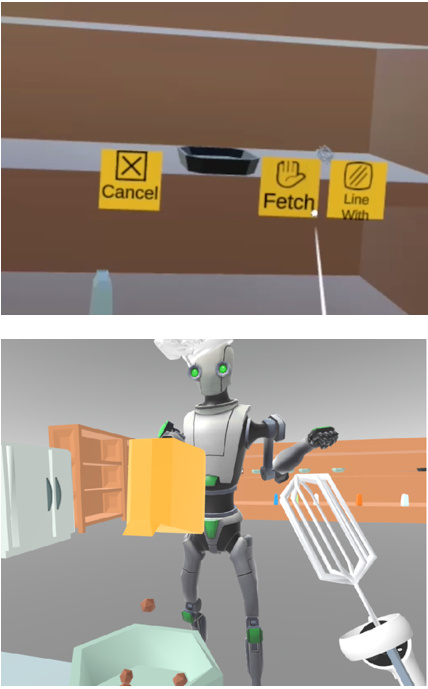
Besides the benchmark and related NLU work, the simulator has been used in a combination with a VR interface. In the latter use case, an avatar of the human user is mirrored in the simulator and can interact with the world. The human avatar can also send commands to the robot via an affordance-based menu, where objects reveal to the user what sorts of actions they may participate in.

Example Video
A brief clip showing the MUHAI robot picking up particles of dough and changing them into cookies.
Software Components
You can access the kitchen simulator at the project repository. The repository provides installation instructions – the simulator can run on Unix, Windows, and (with some work) on MacOS systems – as well as some example scenarios showing the simulator in action.
Unfortunately, as it uses OpenGL, the simulator is not yet available to use over Jupyer Lab. Therefore, if you wish to try it out you will need to git clone the repo and try it locally on your machine for now.
Courses
While the MUHAI kitchen simulator is not itself the topic of a course, the following lectures covered similar topics:
- Game Engines in AI: a practical introduction to the use of Unreal Engine (and game engines more generally) in AI.
Authors and Contact Details
- Mihai Pomarlan, PhD
Researcher (Uni Bremen FB10)
Tel: +4917627951142
Email: pomarlan@uni-bremen.de
Publications
-
A benchmark for recipe understanding in artificial agents by Jens Nevens, Robin De Haes, Rachel Ringe, Mihai Pomarlan, Robert Porzel, Katrien Beuls, Paul Van Eecke. Presented at the Joint international conference on Linguistics, Language Resources, and Evaluation (LREC), 2024. URL: https://aclanthology.org/2024.lrec-main.3/
-
Formalizing Natual Language Quantifiers for Human-Robot Interactions by Stefan Morar, Mihai Pomarlan, Adrian Groza. Presented at the 9th International Workshop on Artificial Intelligence and Cognition (AIC), 2023. Preprint: https://arxiv.org/abs/2308.13192
Live Demo
Unfortunately, as it uses OpenGL, the simulator is not yet available to use over Jupyer Lab. Therefore, if you wish to try it out you will need to git clone the repo and try it locally on your machine for now.