



Description
Pouring the content of a source container into a target container requires skill and planning. When a
robot tries to pour without spilling, it must handle all the different variations of task parameters and
learn which actions are appropriate for the given situation. Doing so in a real setup is time-consuming
and resource-consuming. However, a simulated environment allows us to investigate the large combi-
natorial space given by different materials and potential containers.
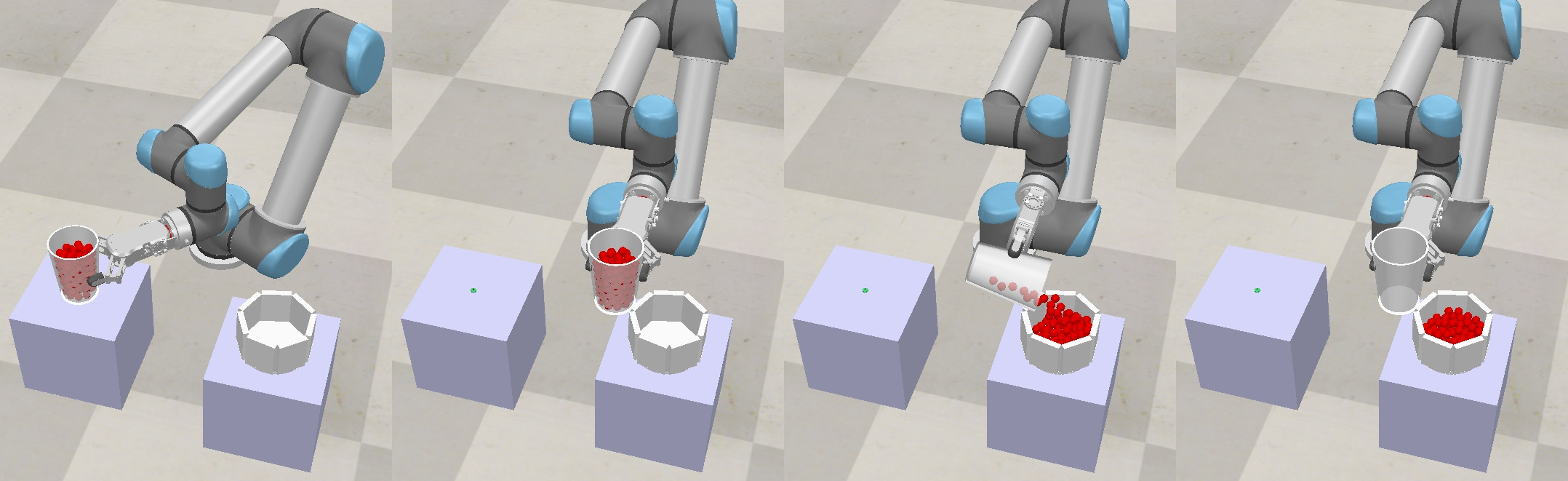
Here we present the robot pouring implementation using a simulated environment with a UR5 robot
arm and a parallel jaw gripper. The pouring simulation was performed using CoppeliaSim with the
Open Dynamics Engine (ODE). In the simulation, the robot poured marbles, represented by particles,
from a source container into a target container with varying pouring parameters and container sizes.
Software
The simulation was implemented using the robotics simulator CoppeliaSim Version 4.8.0 (rev. 0). The
simulator is free to use, in the form of an educational version, by students, teachers and professors alike
belonging to a University. We provide the python script running the pouring simulation in CoppeliaSim
and the corresponding file describing the robot environment.
Causal model of the robot pouring task
Using state-of-the-art causal discovery methods we investigated what pouring tasks parameters, for
example, the characteristics of the pouring movement, lead to deviations between data from the sim-
ulation and real data from pouring tasks that were recorded using a real world UR5 robot arm.
Further investigation was conducted to identify the causes of the spill using probabilistic actual cau-
sation and to determine alternative action parameters that reduce the probability of failure and allow
the robot to take corrective actions. This can enable a robust operation in even unstructured environ-
ments. Here, the robot pouring simulation was leveraged to investigate a larger combinatorial space.
This novel analysis in the field of robotics enables the identification of the cause of task failure and
guides the search for alternative action parameters.
- Dr.-Ing. Jamie Maldonado
Email: jmaldonado@uni-bremen.de - Jonas Krumme
Email: jkrumme@uni-bremen.de
Publications
J. Maldonado, M. Huerkamp, J. Krumme, C. Zetzsche, and M. Beetz, “Robot pouring: Modeling
and sim-to-real evaluation using causal discovery,” in European Robotics Forum 2025 (M.
Huber, A. Verl, and W. Kraus, eds.), (Cham), pp. 314–319, Springer Nature Switzerland, 2025.
J. Maldonado, J. Krumme, C. Zetzsche, V. Didelez, and K. Schill, “Robot pouring: identifying
causes of spillage and selecting alternative action parameters using probabilistic actual
causation,” Frontiers in Cognition, vol. 4, 2025